GPT-5.2:
I think you call this \beta @mathkook ?
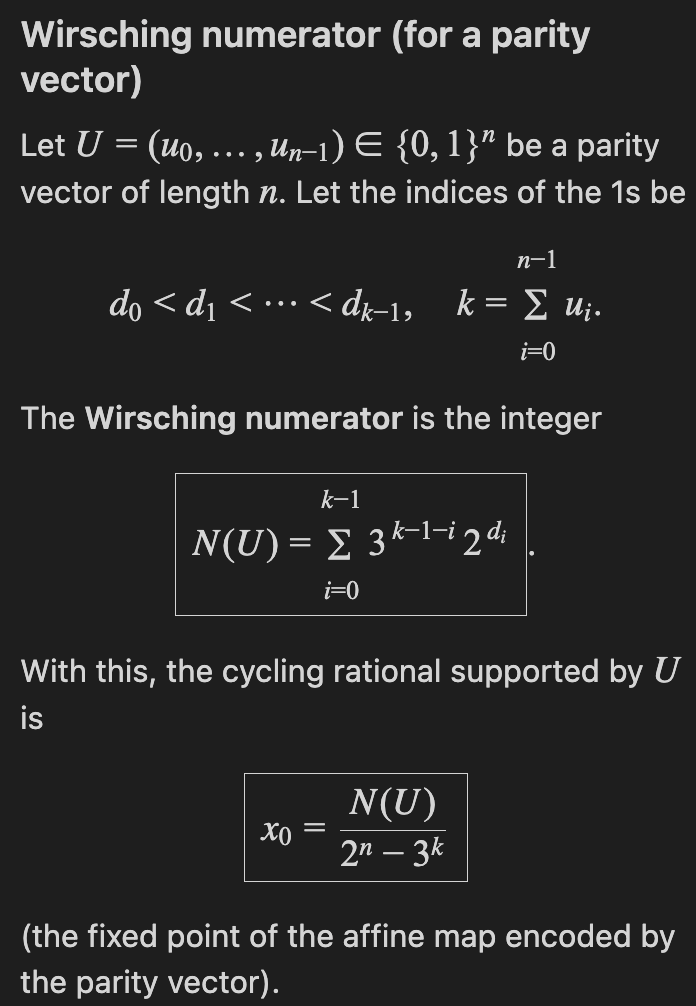
I assume N(U) is defined in Wirsching’s book. Maybe “Wirsching numerator” would be a good standardisation of this concept?
GPT-5.2:
I think you call this \beta @mathkook ?
I assume N(U) is defined in Wirsching’s book. Maybe “Wirsching numerator” would be a good standardisation of this concept?
Seems totally reasonable … and kudos to GPT for coming up with a creative phrase that occurs zero times on the Internet!
Although if you use a person’s name, it kinda sounds like that person was the first to put it in print. More accurate might be “Böhm–Sontacchi numerator” or “Crandall numerator”, both from 1978.
Non-person alternatives might be “parity-vector numerator” or “parity numerator”.
Aside from showing up in the cycle-member formula above, it also shows up in the related formula for “where does n wind up if it follows parity-vector v?” So it makes sense to stay away from cycle-specific names like “cycle numerator”.
I like “parity-vector numerator”!
When using GPT’s notation, the formula giving the n-th term of a sequence is of the form
x_n = \cfrac{3^k}{2^n}x_0 + \cfrac{N(U)}{2^n}.
In Lagarias/Terras’ notation where n is the first term and k the number of iterations, it writes
T^k(n) = \lambda_k(n) \, n + \rho_k(n)
where \lambda_k(n) is called the coefficient and \rho_k(n) the remainder.
So I would rather call the quantity N(U) the “remainder numerator” since it is exactly that. Plus the fact that a numerator generally refers to a rational value.
Wirsching himself calls it the “normalized remainder” map, which sounds good to me. It refers to the “normalized” form of the first equation above involving only positive integers: 2^n x_n = 3^k x_0 + N(U) .
But terminology is also a matter of taste and there is no definitive rule. So up to you.
Very fair point!
“Remainder numerator” sounds good!
This is a microscopic effort of myself researching consensus for an unified language ahah
it’s really needed —
My post, “Some basic algebra for Collatz”, uses the letter D for the the sum as it is equivalent to a difference. If you prefer Greek letters delta would work. I think of beta as the second derivative.
D = N * 2^K - Seed * 3^L = Sum
On the other hand, it may be useful to define this ubiquitous quantity as a function of the parity vector v, independently of any given integer sequence or rational cycle. So @mathkook’s notation \beta(v) or beta-value seems relevant.
On the subject of notation, I’d like to endorse something I’ve seen @oros use, which is
This is extremely helpful when talking about more than one vector, such as two rotations w and u of a given vector v. You can easily say things like “if s(w) = s(u), then …” Or, “let y be the longest common prefix of w and u. If l(y) \geq \frac{1}{2} l(w), then …”
It’s unwieldy if you’re only talking about one vector the whole time, but in that case, you can define l and s to be shorthand for l(v) and s(v).
Overall, it seems like a good alternative to k, x, n, m, etc., while paralleling \beta(v).
The k, x notation always confused me, and I think it boils down to mathematics VS computer science.
It is weird to me to use a variable name that is traditionally discrete, “k”, with one that is traditionally continuous, x, for what are, from their initial definition two discrete quantities. Note that in computer science, n is quasi universally used to mean “length”/“size”.
But I assume this is because mathematicians have studied this “x” as a continuous quantity, using it in Baker/Rhin or trying to do density analysis?
But it biases the approach to me because keeping “x” all the time then suggests that the only interesting thing you can do with it is the above.
Anyway, small rant ![]()
Agree! I think I picked up x from Everett 1977. I could (can) only understand those super-old papers. Probably Everett got it from Diophantine stuff like x^n + y^n = z^n, all predating CS.
PS. It’s possible to refer to the length of v as l_v or n_v, but I found l(v) better, not least because you might want to subscript the v or refer to its reverse v^R.
Note that s(v) can be viewed as an analog of the sum-of-digits function when v is interpreted as a base-2 representation. This function is pervasive in CS and discrete math.
E.g., s(10110) = 3.
Another useful notation might be
\delta(v) = 2^{l(v)} - 3^{s(v)}
or simply
\delta = 2^{l} - 3^{s}.
Then we can express the first term of the (rational) cycle induced by v as
\cfrac{\beta(v)}{\delta(v)}.
It may seem natural to use w instead of s for the weight of a parity vector v. But writing w(v) is not quite nice, and the notation w is also very convenient when considering two vectors v and w like in the nice expression of the \beta-value of the concatenation vw below
\beta(vw) = 3^{s(w)} \, \beta(v) + 2^{l(v)}\beta(w).
We could also use uppercase for vectors and write them as V and W, but w(W) is not nice either.
The post here is an example of @oros terminology – the l(v) and s(v) can be bulkier than k, x, n, or m, but suddenly a w shows up (substring of v), and we can have both s(v) and s(w) without confusion.
I also see a_0 used as the smallest member of the cycle. (I suppose for both integer and rational cycles.)
That’s handy.
Maybe v_0 should be the parity vector corresponding to that smallest member, ie, the rotation of v with minimal \beta.
Then a_0 = \cfrac{\beta(v_0)}{2^{l(v_0)}-3^{s(v_0)}}.
Well, I guess a is a sequence of cycle members, while v is just a vector, rather than a sequence of rotations. Hmm, beats me. But lowest members and \beta-minimal vectors are things we talk about all the time.